Frames¶
Warning
This description is based on the proposal phase in 2012, so that the contents are outdated. Implementation are labeled as “0”, i.e. fov0 and frame0. It is recommended to use the largest number of modules for respective sensors.
Todo
Update the document.
A lot of frames are defined in usual for this kind of project. Here a summary is made.
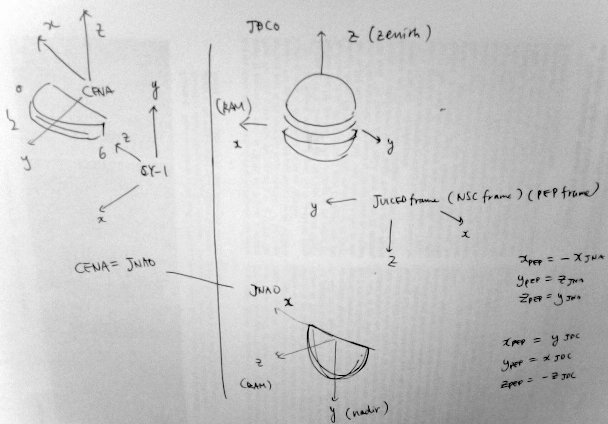
Todo
Update the figure.
Spacecraft¶
JUICE is a 3-axis stabilized spacecraft. The frame definition will be provided in the future, and implemented into the SPICE kernel, but for preparatory purpose I made definition.
pyana.pep.pep_attitude provides the definition and conversion.
Because of the historical reason, the frame is called in a various name.
For example, “SC”, “Spacecraft”, “JUICE”, “PEP”, “NSC” and so on.
“NSC” stands for Nadir-looking Spacecraft Coordinate system.
Definition follows
Center: The spacecraft
z-axis: Nadir direction.
- y-axis: +y=z plane should include the velocity vector
(Frankly speaking, +y is RAM direction)
x-axis: Completes the right hand system.
JDC¶
JDC is ion (and electron) sensor forming 4 pi coverage.
The frame definition will be provided in the future from PEP team
together with SPICE kernels, but for preparatory purpose,
I made definition, and implemented it into pyana.jdc.frame0 and pyana.jdc.fov0.
Here 0 stands for the draft.
Definition follows:
Center: The sensor, while for usual purpose you can consider it as the spacecraft center.
z-axis: Zenith
x-axis: RAM direction (more strictly speaking +x=z plane includes velocity vector)
y-axis: completes the right hand system.
JNA¶
JNA is low energy neutral analyzer. Fan shape with 180 degree aperture is a baseline.
The frame definition will be provided in the future from PEP team
together with SPICE kernels, but for preparatory purpose,
I made definition, and implemented it into pyana.jna.frame0 and pyana.jna.fov0.
Here 0 stands for the draft.
Definition follows:
Center: The sensor, while for usual purpose you can consider it as the spacecraft center.
y-axis: Nadir direction
z-axis: RAM direction (more strictly speaking +z=y plane includes velocity vector)
x-axis: completes the right hand system.
This is the same as the Chandrayaan-1/CENA definition.
JNA angles¶
It is sometimes useful to define the two angles, polar \(\theta_\mathrm{JNA}\) and azimuth \(\phi_\mathrm{JNA}\). The definition follows CENA, but described as below:
\(\theta_\mathrm{JNA}\) =0 is in x-y plane in the JNA frame
\(\theta_\mathrm{JNA}\) =90 is for negative z.
\(\theta_\mathrm{JNA}\) =-90 is for positive z.
\(\phi_\mathrm{JNA}\) =0 (major meridian) is for +y.
\(\phi_\mathrm{JNA}\) =90 is for +x.
The FoV is \(\theta_\mathrm{JNA}\) =-6.05 and -80< \(\phi_\mathrm{JNA}\) <80. Refer to pyana.jna.fov0 module for details.
JoEE¶
JoEE frame is defined as the same manner as JNA0. Implementation is in pyana.joee.frame0.
Note that the FoV direction is 90 degrees different from the JNA0, so that the
angle definition is different. The FoV implementation is found in pyana.joee.fov0.
JoEE angles¶
It is sometimes useful to define the two angles. Since the FoV includes the ram direction together with the zenith/nadir vectors, the \(\theta_\mathrm{JoEE}\) is measured from the y=z plane.
\(\theta_\mathrm{JoEE}\) =0 is y=z plane in the JoEE frame
Positive \(\theta_\mathrm{JoEE}\) is plus x ward. So that \(\theta_\mathrm{JoEE}\) =90 is +x axis.
\(\phi_\mathrm{JoEE}\) =0 is +z axis (RAM direction).
\(\phi_\mathrm{JoEE}\) =90 is -y (negative y) axis.
Conversions¶
The JNA and JDC is rigidly mounted on the spacecraft.
JUICE (=NSC)
|
| (identical)
PEP
|
+-----+-----+-------------+
(rigid) | | (rigid) | (rigid)
JDC JNA JoEE
The conversion matrixes are
implemented in pyana.jdc.frame0.
implemented in pyana.jna.frame0 and pyana.joee.frame0.